DC machine:
DC machine includes the function of generator and motor. Same machine you can use as a generator or motor. There is no change in construction.
If you supply electrical energy to DC machine, it will give you mechanical energy or rotational energy. This is known as motor function. The principle of motor is " whenever a current caring conductor is placed in a magnetic field, it will experience a force and two equal and opposite direction force will create a torque."
If you have mechanical energy in terms of rotation (by prime mover), you can generate electrical energy with the help of DC machine and this function is known as generator. Generator works as principle of electromagnetic induction.
 Different parts of DC machine:
Different parts of DC machine:
1) Yoke:
2) Pole:
5) Armature winding:


Application of DC series motor:

Application of DC shunt motor:
DC machine includes the function of generator and motor. Same machine you can use as a generator or motor. There is no change in construction.
If you supply electrical energy to DC machine, it will give you mechanical energy or rotational energy. This is known as motor function. The principle of motor is " whenever a current caring conductor is placed in a magnetic field, it will experience a force and two equal and opposite direction force will create a torque."
If you have mechanical energy in terms of rotation (by prime mover), you can generate electrical energy with the help of DC machine and this function is known as generator. Generator works as principle of electromagnetic induction.

1) Yoke:
- It is used to protect internal parts of DC machine.
- Provide support to the pole.
- Complete magnetic path.
2) Pole:
- Pole is used to produce magnetic flux inside the DC machine. Pole is made up of low reluctance material like cast iron or cast steel.
- Pole shoe is used to spread the magnetic field produced by the poles. Pole and pole shoe are laminated in large machine.
- Armature provide housing to the armature winding
- It completes magnetic flux path
5) Armature winding:
- whatever current is produced in case of generator, that current is produce in armature winding and in case of motor, voltage is supplied to the armature winding. It made up of copper.
- Field winding is placed on the pole to produce magnetic field inside the DC machine. It is made up from copper.
- In case of generator, commutator is used to convert AC current into DC current. In other words, it functions as a rectifier.
- In case of motor, commutator is used to produce unidirectional torque.
- Brushes are used to carry current from and to commutator. It is made of carbon.
- Shaft is used to transfer mechanical power from prime mover or to load.
Classification of DC motor:
Motor is used to convert mechanical energy into electrical energy. As shown in construction of DC motor, there are two winding is used. One is field winding and second is armature winding. According to connection of this winding, DC motor is classify into main two parts;
- Separately excited
- Self excited
Self excited is further classify into three types;
- Series motor
- Shunt motor
- Compound motor
1) Separately excited: In separately excited motor, field winding and armature winding is not physically connected but this winding is magnetically connected. Here, the field coil is energized from a separate DC voltage source and the armature coil is also energized from another source. Armature voltage source may be variable but, independent constant DC voltage is used for energizing the field coil. So, those coils are electrically isolated from each other, and this connection is the specialty of this type of DC motor.

Application: Separately excited dc motors have industrial applications. This type of motors is used in trains and for automatic traction purposes. They are often used as actuators.
2) Self Excited DC motor: In self excited DC motor, field winding and armature winding is physically connected. The current in the winding is supplied by the machine or motor itself. Self-excited DC Motor is further divided into three parts according to connection of both winding and this is known as shunt wound, and series wound motor. They are explained below in detail.

- Series DC motor: In this case, the armature winding and field winding are connected in series so, the entire armature current flows through the field winding. The series wound self excited dc motor is diagrammatically represented as below figure for better understanding. In a series dc motor, the speed varies with load and operation wise this is its main difference from a shunt wound dc motor.
- This type of motor has good speed regulation even as the load varies.
- It has high starting torque so it has wide application in conveyors,trains,compressors etc.
- It is typically used were adjustable speed is required.

- Shunt DC motor: In case of shunt wound DC motor, the armature winding and field winding are connected in parallel. So, the field winding are exposed to the entire terminal voltage. The shunt wound dc motor is a constant speed motor, as the speed does not vary here with the variation of mechanical load on the output.
Application of DC shunt motor:
- A DC shunt motor is constant speed motor(as for a given field current the drop in speed from no load to full load is less than 6 to 7 % ) so it is used where constant speed is required.But SCIM is replacing it in industry.
- When the driven load needs a wide range of speed variation both below and above base speed, this motor is used.(e.g:lathe)
- DC shunt motor is easy to control using VFD(variable frequency drive) so it is used in the places where variable speed is required
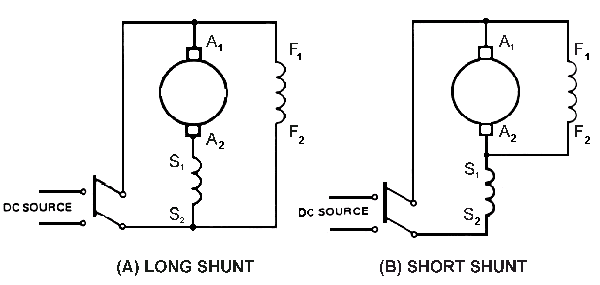
- Compound motor: The compound excitation characteristic in a dc motor is obtained by combining the operational characteristic of both the shunt and series excited dc motor. The compound wound self excited dc motor or simply compound wound dc motor essentially contains the field winding connected both in series and in parallel to the armature winding. The excitation of compound wound dc motor can be of two types depending on the nature of compounding.
- Cumulative Compound DC Motor (Long Shunt): In which the shunt field flux assists the main field flux, produced by the main field connected in series to the armature winding.
- Differential compound dc motor (Short shunt): In which the arrangement of shunt and series winding is such that the field flux produced by the shunt field winding diminishes the effect of flux by the main series field winding.The net flux produced in this case is lesser than the original flux and hence does not find much of a practical application.
Application of compound DC motor:
Cumulative compound wound motors are virtually suitable for almost all applications like business machines, machine tools, agitators and mixers etc. Compound motors are used to drive loads such as shears, presses and reciprocating machines.
 A) Armature Resistance Control Method for DC Series Motor:
A) Armature Resistance Control Method for DC Series Motor:



x
IArmature resistance control method, a variable resistance is directly connected in series with the supply. This reduces the voltage available across the armature and hence the speed falls. By changing the value of variable resistance, any speed below the normal speed can be obtained. This is the most common method employed to control the speed of DC series motors.


Speed control of DC motor:
Three types of DC motor; series motor, shunt motor and compound motor. In these motors, speed can be change by changing below parameter,
1) Terminal voltage of the armature V
2) External resistance in armature circuit Ra
3) Flux per pole φ
Let’s start with speed Control of DC Series Motor:
Speed control of DC series motor can be done either by armature control or by field control. Armature Control of DC Series Motor. Connection diagram (circuit diagram) of DC series motor is as below figure. Speed adjustment of DC series motor by armature control may be done by any one of the methods that follow.
 A) Armature Resistance Control Method for DC Series Motor:
A) Armature Resistance Control Method for DC Series Motor:



x
IArmature resistance control method, a variable resistance is directly connected in series with the supply. This reduces the voltage available across the armature and hence the speed falls. By changing the value of variable resistance, any speed below the normal speed can be obtained. This is the most common method employed to control the speed of DC series motors.
B) Flux control method DC Series Motor:
In Flux control method, the flux produced by the series motor is varied. The variation of flux can be achieved in the following ways:
1) Field diverters - In this method, a variable resistance (called field diverter) is connected in parallel with series field winding. A part of the line current passes through this diverter and thus weakens the field. Since N ∝ 1/ϕ, speed also varies with field flux. The lowest speed obtained by this method is the normal speed of motor when the current through diverter is zero, i.e., diverter open circuited.
2) Armature diverter - In order to obtain speeds below the normal speed, a variable resistance (called armature diverter) is connected in parallel with the armature. The diverter reduces the armature current. As a result, flux get increased. So, the speed decreases since N ∝ 1/ϕ.
3) Tapped field control - In this method, the flux is reduced (and hence speed is increased) by decreasing the number of turns of the series field winding. The switch can short circuit any part of the field winding, thus decreasing the flux and raising the speed. With full turns of the field winding, the motor runs at normal speed and as the field turns are cut out, speeds higher than normal speed are achieved.
The speed control of a DC Shunt motor can be achieved by the following methods:
1) Flux Control Method
2) Armature control Method
3) Voltage Control Method
Flux Control Method DC Shunt motor:
This method is very frequently used because it is very simple and economic. In this method the speed control can be achieved by varying the flux Φ, because the motor speed N ∝ (1/ Φ) and therefore it is named flux control method. Along with the shunt field winding an adjustable resistance is connected in series as shown in the figure. This adjustable resistance is also known as shunt field rheostat. This shunt field rheostat moderates the shunt current and the flux. As a result, we can only increase the speed beyond the rated speed of the motor. Normally, it allows the speed to increase in the ratio of 3:1 varied speed choices have a tendency to create instability and meager commutation.
Armature Control Method DC Shunt motor
In this method the speed control can be achieved by varying voltage across the armature and the back EMF Eb. This is obtained by connecting an adjustable resistance in series by way of the armature shown in fig. This adjustable resistance is also known as controller resistance Ra. In this method is decreased due to voltage drop in the Ra. Since speed is directly proportional to back EMF. By using this method, the speed can only control lower than the normal speed because the maximum speed is that corresponding to Ra=0 i.e. normal speed.
Voltage Control Method DC Shunt motor
In this process the supply voltage is providing the field current is not the same from that which deliveries the armature. By using this technique, we can avoid the drawback of meager speed regulation and efficiency as we have seen the armature control method. But this method is fairly expensive. So, this method is engaged for bigger size of motor and where the importance is given for efficiency.
Speed control of DC Shunt Motor using voltage control method can be achieved in two ways. They are (A) Multiple Voltage control and (B) Ward-Leonard System.
A) Multiple Voltage Control Method
In this method a fixed voltage source is permanently connected across the shunt field of the motor. The armature can be connected across quite a lot of diverse voltages over a right switch gear. The speed of the motor can be controlled by applying the various voltages across the armature. Since the speed is directly proportional to the applied voltage across the armature will be nearly proportionate to the applied voltage across armature. By using shunt field regulator intermediate speed can be obtained in this method.
B) Ward-Leonard System
In this system, the field circuit is delivered from an isolated source. From a variable voltage generator, the adjustable voltage for the armature is obtained. The fig above shows the typical Ward-Leonard system. In this system the armature of the DC Shunt motor is directly connected to a generator driven by a constant speed AC motor. The field of the generator is supplied from the exciter (E). The field of shunt motor is supplied from a constant voltage exciter. The Generator voltage can be varied by means of generator field regulator. The voltage applied to the motor may be reversed by backing the field current of generator through controller FC. On occasion, a field regulator is contained within the field circuit of DC shunt motor for additional speed adjustment. By means of this method, the motor can be worked at any speed up to its maximum speed.

Cumulative Compound Motors
Below figure shows a diagram of the cumulative compound motor. It is so called because the shunt field is connected so that its coils are aiding the magnetic fields of the series field and armature. The shunt winding can be wired as a long shunt or as a short shunt. Figure-a and Fig.b show the motor connected as a short shunt where the shunt field is connected in parallel with only the armature. Figure-c shows the motor connected as a long shunt where the shunt field is connected in parallel with both the series field, interpoles, and the armature.
Below figure-B also shows the short shunt motor as a cumulative compound motor, which means the polarity of the shunt field matches the polarity of the armature. You can see in this figure that the top of the shunt field is positive polarity and that it is connected to the positive terminal of the armature. In Fig. b you can see that the shunt field has been reversed so that the negative terminal of the shunt field is now connected to the positive terminal of the armature. This type of motor is called a differential compound because the polarities of the shunt field and the armature are opposite.
The cumulative compound motor is one of the most common DC motors because it provides high starting torque and good speed regulation at high speeds. Since the shunt field is wired with similar polarity in parallel with the magnetic field aiding the series field and armature field, it is called cumulative. When the motor is connected this way, it can start even with a large load and then operate smoothly when the load varies slightly.

FIGURE (a) Diagram of a cumulative compound motor, (b) Diagram of a differential compound motor
You should recall that the shunt motor can provide smooth operation at full speed, but it cannot start with a large load attached, and the series motor can start with a heavy load, but its speed cannot be controlled. The cumulative compound motor takes the best characteristics of both the series motor and shunt motor, which makes it acceptable for most applications.
Differential Compound Motors
Differential compound motors use the same motor and windings as the cumulative compound motor, but they are connected in a slightly different manner to provide slightly different operating speed and torque characteristics. Figure 12-17b shows the diagram for a differential compound motor with the shunt field connected so its polarity is reversed to the polarity of the armature. Since the shunt field is still connected in parallel with only the armature, it is considered a short shunt.
In this diagram you should notice that Fl and F2 are connected in reverse polarity to the armature. In the differential compound motor the shunt field is connected so that its magnetic field opposes the magnetic fields in the armature and series field. When the shunt field's polarity is reversed like this, its field will oppose the other fields and the characteristics of the shunt motor are not as pronounced in this motor. This means that the motor will tend to over speed when the load is reduced just like a series motor. Its speed will also drop more than the cumulative compound motor when the load increases at full rpm. These two characteristics make the differential motor less desirable than the cumulative motor for most applications.
0 comments:
Post a Comment